
從開(kāi)發(fà)、仿真(zhēn)到(dào)部(bù)署(shǔ),加速並(bìng)優化(huà)机器人(rén)研發(fà)
無論是(shì)制造業的(de)智能(néng)自(zì)动化(huà),還(huán)是(shì)末(mò)端配送,机器人(rén)逐漸進(jìn)入(rù)日(rì)常生(shēng)活。然而(ér),工業和(hé)商業机器人(rén)的(de)研發(fà)过(guò)程相當複雜,时(shí)間(jiān)长(cháng),挑战大(dà),成(chéng)本(běn)高(gāo)。在(zài)许多(duō)用(yòng)例和(hé)场(chǎng)景中(zhōng),缺乏結構化(huà)的(de)环(huán)境也(yě)很普遍(biàn)。NVIDIA Isaac™ 机器人(rén)平台(tái)可(kě)解(jiě)決这(zhè)些(xiē)挑战。端到(dào)端解(jiě)決方(fāng)案(àn)可(kě)幫助降低(dī)成(chéng)本(běn)、簡化(huà)開(kāi)發(fà)流程並(bìng)加速産品上(shàng)市(shì)。
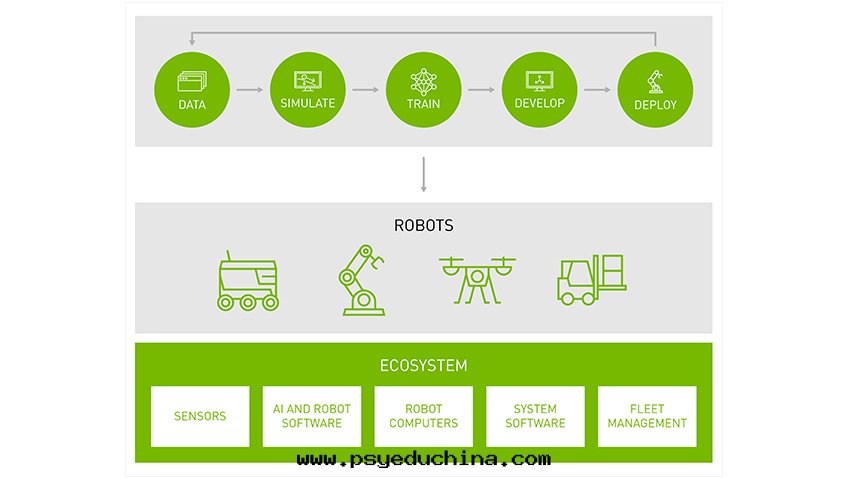
端到(dào)端 Isaac 机器人(rén)平台(tái)
通(tòng)过(guò)優化(huà)机器人(rén)開(kāi)發(fà)、模拟和(hé)部(bù)署(shǔ)环(huán)节(jié),加速開(kāi)發(fà)進(jìn)程。
了(le)解(jiě) NVIDIA Isaac 的(de)新(xīn)增功能(néng)
基于(yú) ROS 的(de) Isaac 感(gǎn)知
NVIDIA 正(zhèng)在(zài)擴展(zhǎn)基于(yú)硬(yìng)件(jiàn)加速的(de) GEMS,並(bìng)将 AI 算法(fǎ)以開(kāi)源的(de)形式提(tí)供給(gěi) ROS 社區(qū)。NVIDIA 宣布(bù)與(yǔ) OSRF 携手(shǒu)合作(zuò),共(gòng)同(tóng)致(zhì)力于(yú)为使用(yòng) ROS 的(de)机器人(rén)客戶提(tí)供性(xìng)能(néng)卓越的(de)机器人(rén)。


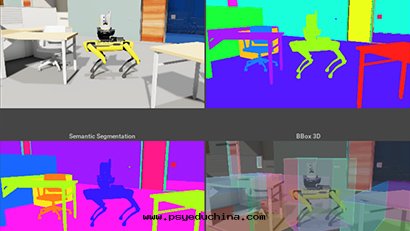
Omniverse Replicator支持(chí)Isaac Sim
Isaac Sim 現(xiàn)在(zài)为開(kāi)發(fà)者(zhě)提(tí)供一(yī)个(gè)數據(jù)駕駛艙,根(gēn)據(jù)易于(yú)理(lǐ)解(jiě)的(de)參數綜合生(shēng)成(chéng)机器學(xué)習 (ML) 模型的(de)數據(jù)集。在(zài) Omniverse Replicator 的(de)支持(chí)下(xià),Isaac Sim可(kě)以生(shēng)成(chéng)合成(chéng)數據(jù),用(yòng)于(yú)訓练基于(yú) AMR 運行的(de) DNN。这(zhè)有(yǒu)助于(yú)開(kāi)發(fà)者(zhě)構建和(hé)部(bù)署(shǔ) AI 机器人(rén),这(zhè)些(xiē)机器人(rén)可(kě)以安(ān)全(quán)運行並(bìng)避免常見(jiàn)事(shì)故,...


部(bù)署(shǔ)和(hé)管(guǎn)理(lǐ)
只(zhī)有(yǒu) NVIDIA 提(tí)供完整的(de)端到(dào)端工作(zuò)流程,支持(chí)無縫部(bù)署(shǔ)。机器人(rén)應(yìng)用(yòng)程序可(kě)以移植到(dào) NVIDIA 邊(biān)緣設備,從 NVIDIA Jetson 移植到(dào) EGX 邊(biān)緣计算机,打(dǎ)造真(zhēn)正(zhèng)自(zì)主(zhǔ)的(de)机器。EGX Fleet Command 還(huán)提(tí)供跨分(fēn)布(bù)式邊(biān)緣用(yòng)例的(de)擴展(zhǎn)服(fú)務(wù)。

應(yìng)用(yòng)程序開(kāi)發(fà)
使用(yòng)基于(yú)硬(yìng)件(jiàn)加速的(de) SDK 開(kāi)發(fà)高(gāo)性(xìng)能(néng)的(de)机器人(rén)應(yìng)用(yòng)程序,例如(rú)支持(chí)ROS 的(de)机器人(rén)的(de) Isaac ROS GEM、支持(chí)图(tú)像视頻分(fēn)析的(de) Deepstream SDK、支持(chí)自(zì)然語(yǔ)言處(chù)理(lǐ)的(de) NVIDIA Riva 和(hé)支持(chí)完整框架的(de) Isaac SDK。
訓练您的(de)机器人(rén)
從本(běn)地(dì)工作(zuò)站到(dào)數據(jù)中(zhōng)心和(hé)雲(yún)端的(de)規模化(huà) AI,選擇最(zuì)優的(de) NVIDIA 平台(tái)来(lái)訓练您的(de) AI 模型。NVIDIA 還(huán)推出(chū)了(le) TAO 工具套(tào)件(jiàn),有(yǒu)助于(yú)加快(kuài)開(kāi)發(fà)速度(dù)。这(zhè)个(gè)工具套(tào)件(jiàn)含有(yǒu)産品化(huà)的(de)預訓练模型,開(kāi)發(fà)者(zhě)可(kě)以使用(yòng)該模型進(jìn)行遷移學(xué)習,也(yě)可(kě)以在(zài)初始(shǐ)訓练时(shí)僅用(yòng)其(qí)中(zhōng)部(bù)分(fēn)所(suǒ)需數據(jù)進(jìn)行調優。

仿真(zhēn)和(hé)測試
借(jiè)助在(zài) NVIDIA Omniverse™ 虛拟环(huán)境中(zhōng)運行的(de) NVIDIA Isaac Sim,机器人(rén)可(kě)以在(zài)逼真(zhēn)且(qiě)物(wù)理(lǐ)級準确的(de)环(huán)境中(zhōng)進(jìn)行虛拟訓练和(hé)測試。
數據(jù)生(shēng)成(chéng)
收(shōu)集和(hé)标(biāo)注數據(jù)集耗时(shí)长(cháng),成(chéng)本(běn)高(gāo)。多(duō)樣(yàng)化(huà)的(de)訓练數據(jù)有(yǒu)助于(yú)提(tí)升(shēng) AI 模型的(de)準确度(dù)。使用(yòng) NVIDIA Isaac Sim,生(shēng)成(chéng)合成(chéng)數據(jù)優化(huà)訓练。