



簡介:
此(cǐ)款機(jī)械臂搭载(zài)nvidia jetson系(xì)列産品,可(kě)快(kuài)速构建图(tú)像處(chù)理(lǐ)、機(jī)械臂控制裸機(jī)開(kāi)發(fà),並(bìng)保留jetson原 生(shēng)态開(kāi)放系(xì)統,使二次(cì)開(kāi)發(fà)簡單快(kuài)捷。該機(jī)械臂自(zì)重(zhòng)1030g,有(yǒu)效载(zài)荷250g,臂展(zhǎn)280mm,體(tǐ)积小巧 但功能強(qiáng)大(dà),具備豐富的(de)软(ruǎn)硬(yìng)件(jiàn)交互方(fāng)式及(jí)多(duō)樣(yàng)化(huà)兼容拓展(zhǎn)接口(kǒu),支持(chí)多(duō)平台(tái)的(de)二次(cì)開(kāi)發(fà),有(yǒu)效幫助用(yòng) 戶實(shí)現(xiàn)多(duō)场景的(de)應(yìng)用(yòng)開(kāi)發(fà)。
搭载(zài)nvidia jetson核心(xīn)主(zhǔ)控
arm64架构多(duō)核微處(chù)理(lǐ)器,运行Ubuntu平台(tái)。
開(kāi)放角(jiǎo)度(dù)、坐标(biāo)、速度(dù)、電(diàn)流、電(diàn)壓、IO等多(duō)種(zhǒng)控制接口(kǒu)。
內(nèi)置Ubuntu 操作(zuò)系(xì)統,專为(wèi)機(jī)器人(rén)開(kāi)發(fà)
內(nèi)置多(duō)種(zhǒng)開(kāi)發(fà)环(huán)境,如(rú):ROS、Python等。
開(kāi)放系(xì)統底层(céng)操作(zuò)權限,支持(chí)用(yòng)戶定(dìng)制化(huà)開(kāi)發(fà)。
支持(chí)ROS1+ROS2和(hé)图(tú)形化(huà)編程
支持(chí)ROS1+ROS2多(duō)版本(běn)應(yìng)用(yòng),讓開(kāi)發(fà)不(bù)再受限。
支持(chí)图(tú)形化(huà)編程软(ruǎn)件(jiàn),讓機(jī)器人(rén)編程應(yìng)用(yòng)觸手(shǒu)可(kě)及(jí)。
图(tú)像識别 豐富配件(jiàn) 應(yìng)用(yòng)廣泛
自(zì)带(dài)图(tú)像識别算法(fǎ),可(kě)選配任意(yì)攝像头(tóu)。
自(zì)主(zhǔ)搭配顯示器、夾爪吸泵等不(bù)同(tóng)配件(jiàn),實(shí)現(xiàn)更(gèng)多(duō)應(yìng)用(yòng)化(huà)场景。
獨特(tè)工業設計(jì),极(jí)致小巧
一(yī)體(tǐ)化(huà)設計(jì),整體(tǐ)機(jī)身(shēn)結构紧湊,淨重(zhòng)僅1030g,十(shí)分(fēn)便于(yú)攜带(dài)。
模块(kuài)化(huà)設計(jì),備件(jiàn)少、維護成(chéng)本(běn)低(dī),可(kě)快(kuài)速拆卸更(gèng)換,實(shí)現(xiàn)即插即用(yòng)。
高(gāo)配置,搭配Lego接口(kǒu)
內(nèi)含6个(gè)高(gāo)性(xìng)能伺服(fú)電(diàn)機(jī),響應(yìng)快(kuài),慣量(liàng)小,转動(dòng)平滑。
底座及(jí)末端带(dài)有(yǒu)乐(lè)高(gāo)科技件(jiàn)接口(kǒu),适用(yòng)于(yú)各(gè)项微型嵌入式設備開(kāi)發(fà)。
1 結构參數
1.1 機(jī)械臂參數
| 指标(biāo) | 參數 |
| 名稱 | 機(jī)械臂 |
| 自(zì)由(yóu)度(dù) | 6 |
| 有(yǒu)效負载(zài) | 250g |
| 工作(zuò)半径 | 280mm |
| 重(zhòng)量(liàng) | 860g |
| 電(diàn)源输入 | 12V,5A |
| 工作(zuò)温(wēn)度(dù) | -5-45℃ |
1.2 工作(zuò)空(kōng)间
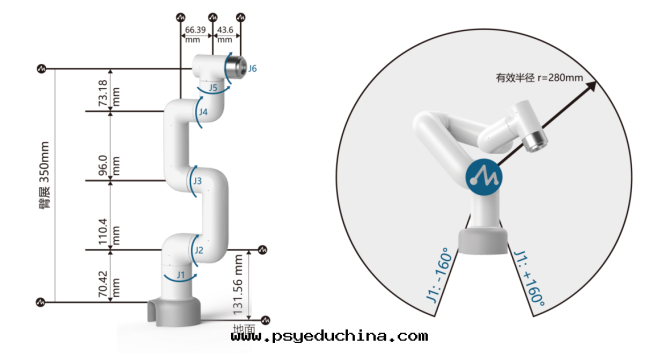
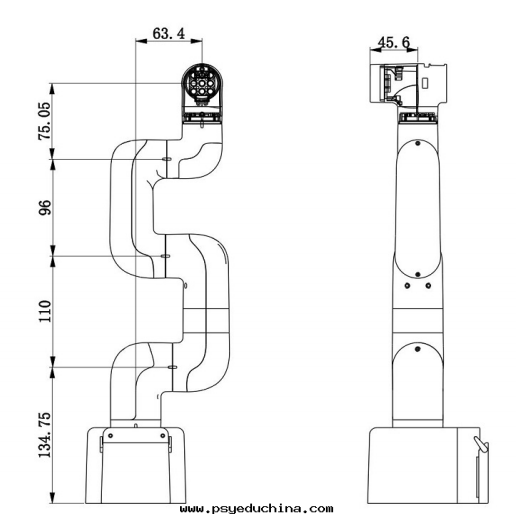
1.3 規格尺(chǐ)寸(cùn)
1.4 關(guān)节运動(dòng)範圍
| 關(guān)节 | 範圍 |
| J1 | -165 ~ +165 |
| J2 | -165 ~ +165 |
| J3 | -165 ~ +165 |
| J4 | -165 ~ +165 |
| J5 | -165 ~ +165 |
| J6 | -175 ~ +175 |
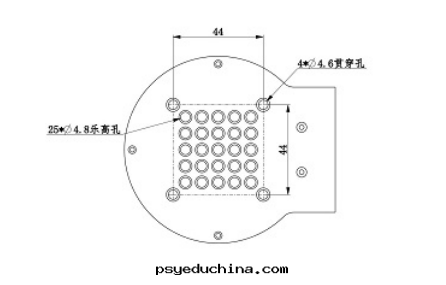
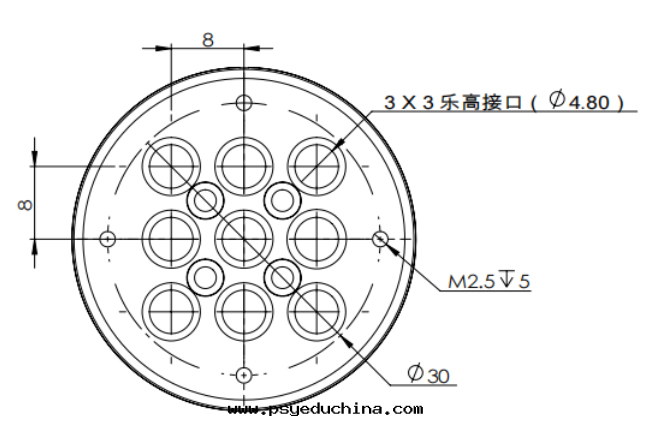
1.5 孔位(wèi)安裝(zhuāng)
機(jī)器人(rén)底座安裝(zhuāng)法(fǎ)蘭,底座同(tóng)时(shí)兼容乐(lè)高(gāo)科技件(jiàn)安裝(zhuāng)方(fāng)式和(hé)M4螺丝(sī)安裝(zhuāng)方(fāng)式。
機(jī)器人(rén)末端安裝(zhuāng)法(fǎ)蘭,機(jī)械臂末端同(tóng)时(shí)兼容乐(lè)高(gāo)科技件(jiàn)孔与螺丝(sī)螺紋孔。
2 電(diàn)子參數
| 指标(biāo) | 參數 |
| SOC | ESP32 |
| CPU | NVIDIA Jetson |
| 藍(lán)牙(yá)/無線(xiàn) | 有(yǒu) |
| USB | USB3.0 x4 |
| 顯示屏幕 | 無 |
| HDMI接口(kǒu) | HDMI x2 |
| 自(zì)定(dìng)義按鍵 | 無 |
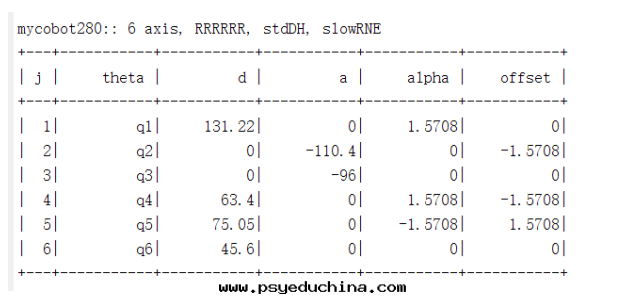
3 DH參數
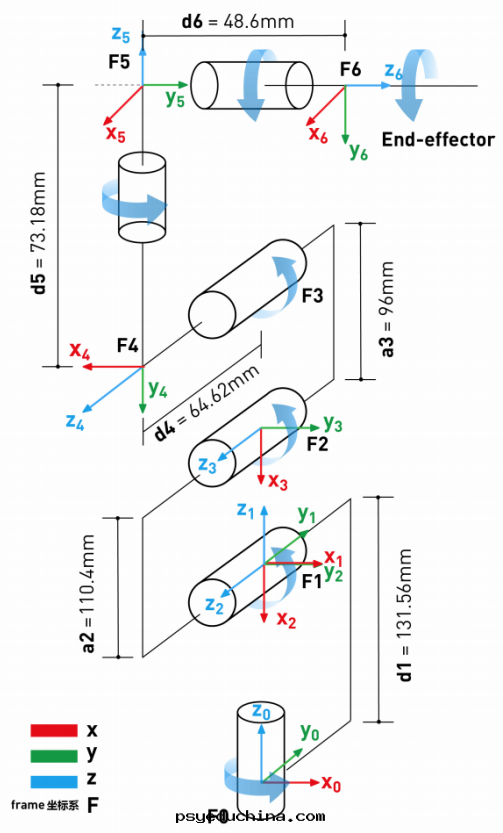
SDH參數表(biǎo):
機(jī)械臂電(diàn)气(qì)接口(kǒu)
1 介紹
1.1 底座
A. 底座正(zhèng)面(miàn)接口(kǒu)如(rú)图(tú) 2.1.8.2-1 所(suǒ)示:

图(tú) 2.1.8.2-1 F底座正(zhèng)面(miàn)接口(kǒu)
① 功能接口(kǒu)組一(yī)
② 功能接口(kǒu)組二
③ 功能接口(kǒu)組三(sān)
④ 功能接口(kǒu)組四
B. 底座上(shàng)面(miàn)接口(kǒu)如(rú)图(tú) 2.1.8.2-2 所(suǒ)示:

图(tú) 2.1.8.2-2 底座上(shàng)面(miàn)接口(kǒu)
① 功能接口(kǒu)組五(wǔ)
1.2 底座接口(kǒu)说(shuō)明(míng)
将功能接口(kǒu)組一(yī)中(zhōng)的(de)tx、rx、gnd連(lián)接至jetson载(zài)闆上(shàng)的(de)tx、rx、gnd即可(kě)控制機(jī)械臂,其他(tā)功能接口(kǒu)無 法(fǎ)使用(yòng)
2 機(jī)械臂末端電(diàn)气(qì)接口(kǒu)
2.1 機(jī)械臂末端介紹
A. 機(jī)械臂末端如(rú)图(tú) 2.1.8.2-9 和(hé)图(tú) 2.1.8.2-10 所(suǒ)示:

图(tú) 2.1.8.2-9 機(jī)械臂末端
① 夾爪接口(kǒu)
② Atom

图(tú) 2.1.8.2-10 機(jī)械臂末端
① 功能接口(kǒu)組六(liù)
② Grove
③ Type C
2.2 末端接口(kǒu)说(shuō)明(míng)
夾爪接口(kǒu):用(yòng)于(yú)末端拓展(zhǎn)夾爪时(shí)使用(yòng),當前支持(chí)配套(tào)的(de)自(zì)适應(yìng)夾爪使用(yòng)。 Atom:用(yòng)于(yú) 5X5 RGB LED
吸泵接口(kǒu):該接口(kǒu)在(zài)jetson载(zài)闆上(shàng) 其他(tā)功能接口(kǒu)無法(fǎ)使用(yòng)